static const struct of_device_id gpio_dt_ids[] = {
{ .compatible = "100ask,gpio-demo", },
{ }
};
static struct platform_driver gpio_platform_driver = {
.driver = {
.name = "100ask_gpio_plat_drv",
.of_match_table = gpio_dt_ids,
},
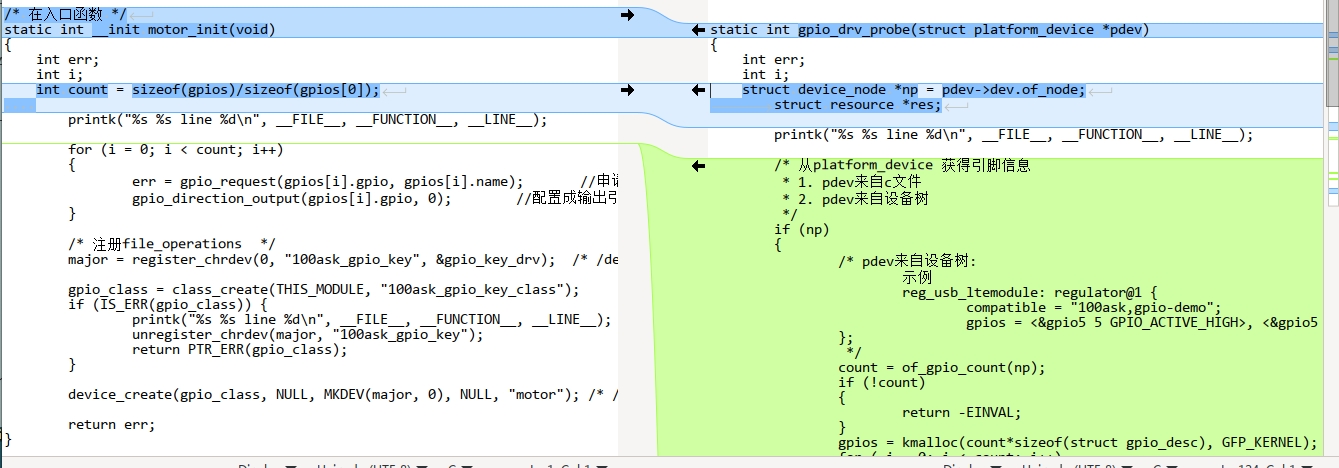
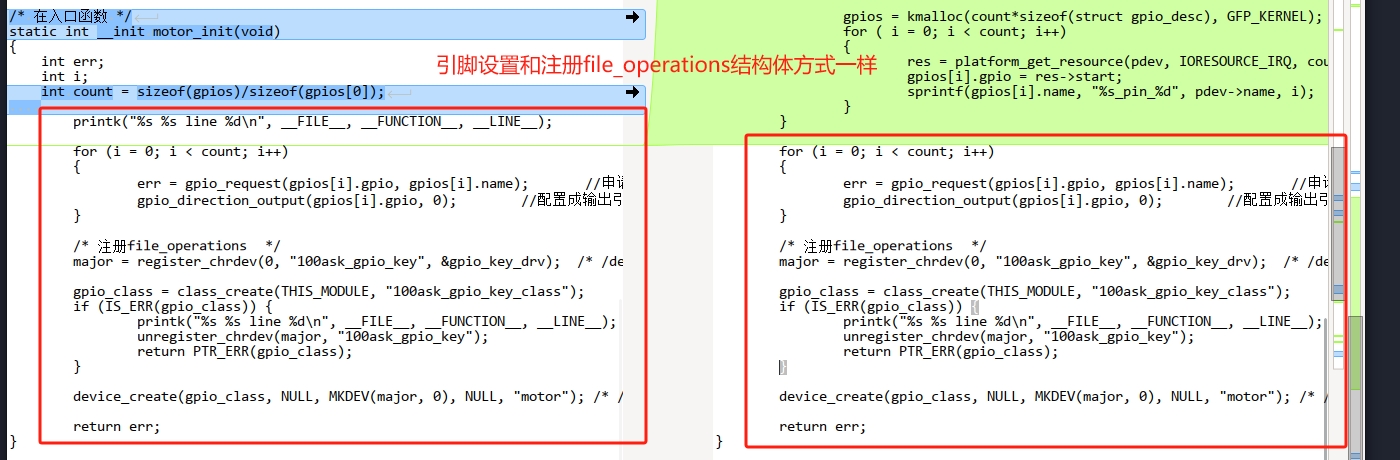
.probe = gpio_drv_probe,
.remove = gpio_drv_remove,
};
static int __init gpio_drv_init(void)
{
return platform_driver_register(&gpio_platform_driver);
}
static void __exit gpio_drv_exit(void)
{
platform_driver_unregister(&gpio_platform_driver);
}
module_init(gpio_drv_init);
module_exit(gpio_drv_exit);
MODULE_LICENSE("GPL");