立创tspi训练营笔记-rk3566修改编译设备树即编译内核(使用WSL、docker)
2024年3月 · 预计阅读时间: 2 分钟
关于什么是设备树,设备树的语法,单独编译设备树的方法可以查看立创开发板训练营-Linux设备树的文档。
本文主要讲解使用WSL2与Docker修改设备树文件,编译内核并下载到开发板上。
关于WSL2、Docker的安装可以参考我之前的笔记:
立创泰山派tspi-训练营笔记-WSL2安装使用Docker(Win11)
立创泰山派tspi-训练营笔记-WSL2使用Docker编译泰山派tspi的SDK(Win11)
修改设备树文件#
我们就以立创训练营的作业选几个为例来修改设备树:
- 修改设备树失能泰山派上的三色用户LED灯
- 修改设备树失能和使能HDMI输出
- 关闭网口解决串口因寻不到网口频繁打印日志问题
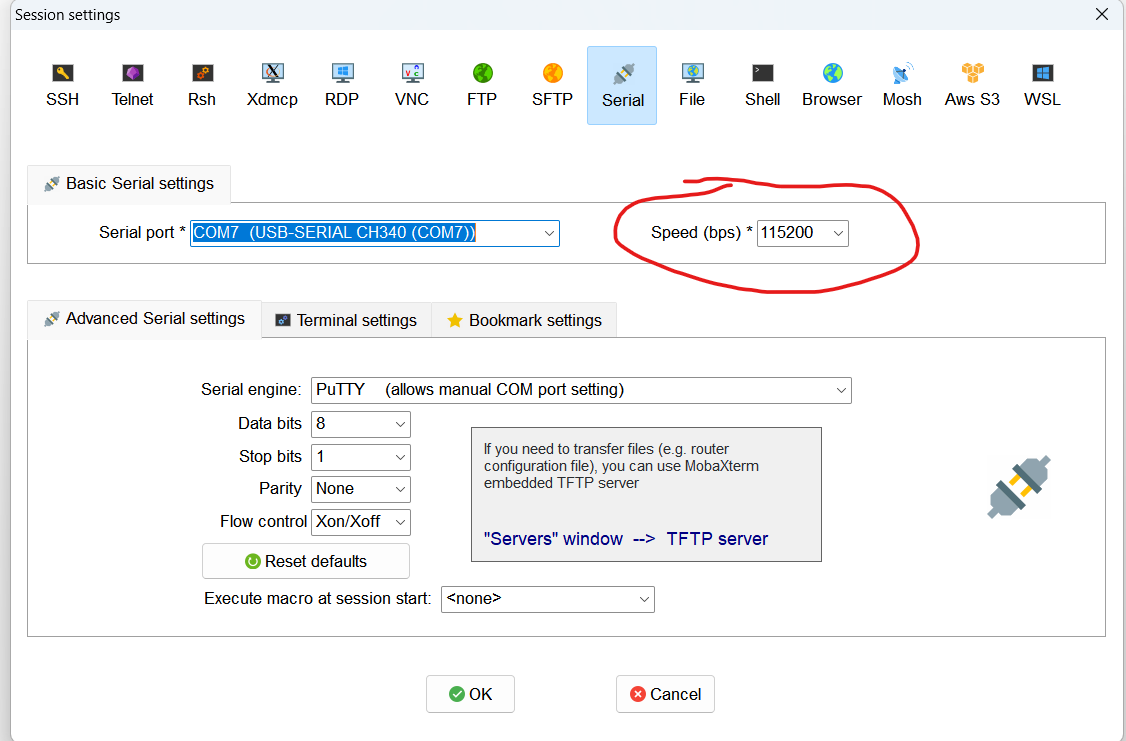
- 调试串口的波特率目前是1500000,尝试把波特率改成115200
如果使用WSL可以直接使用vscode打开SDK的文件夹:
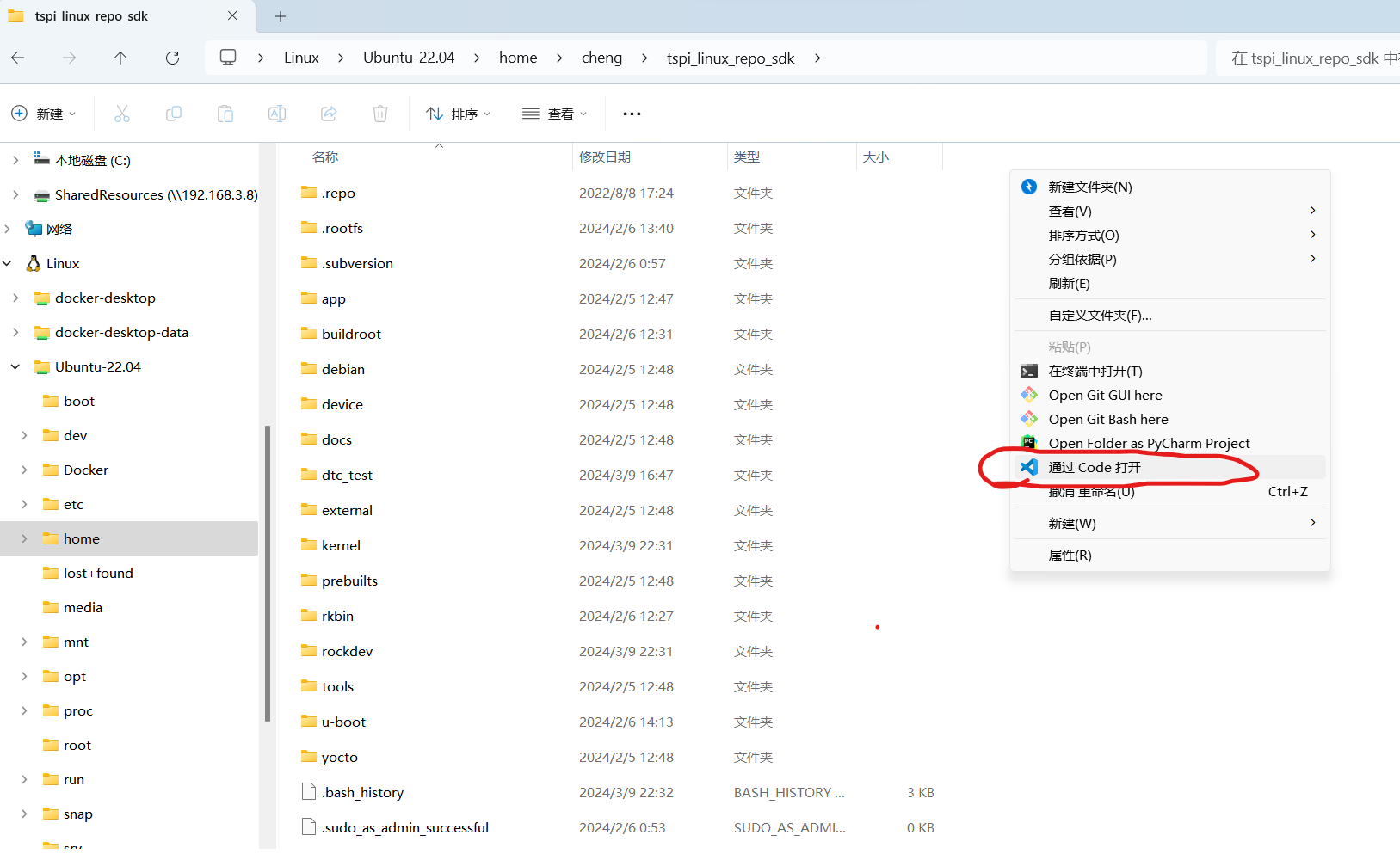
第一次打开会有个弹窗,点允许就可以。
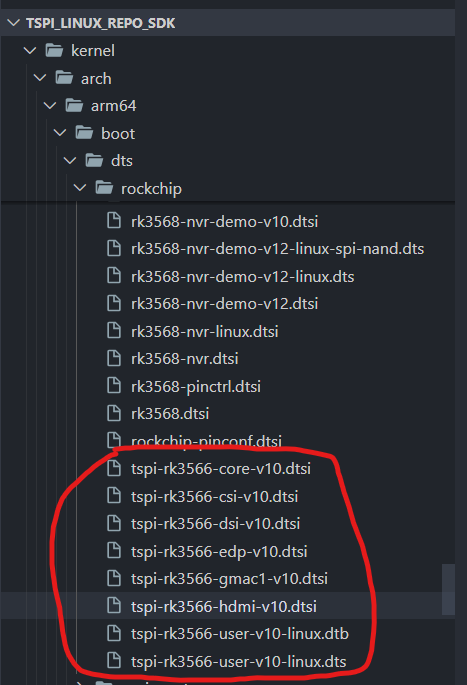
在右侧找到设备树文件,如图进入这个目录,拉到最下面
修改设备树失能泰山派上的三色用户LED灯
在
tspi-rk3566-user-v10-linux.dts文件中设置三色灯状态为disabled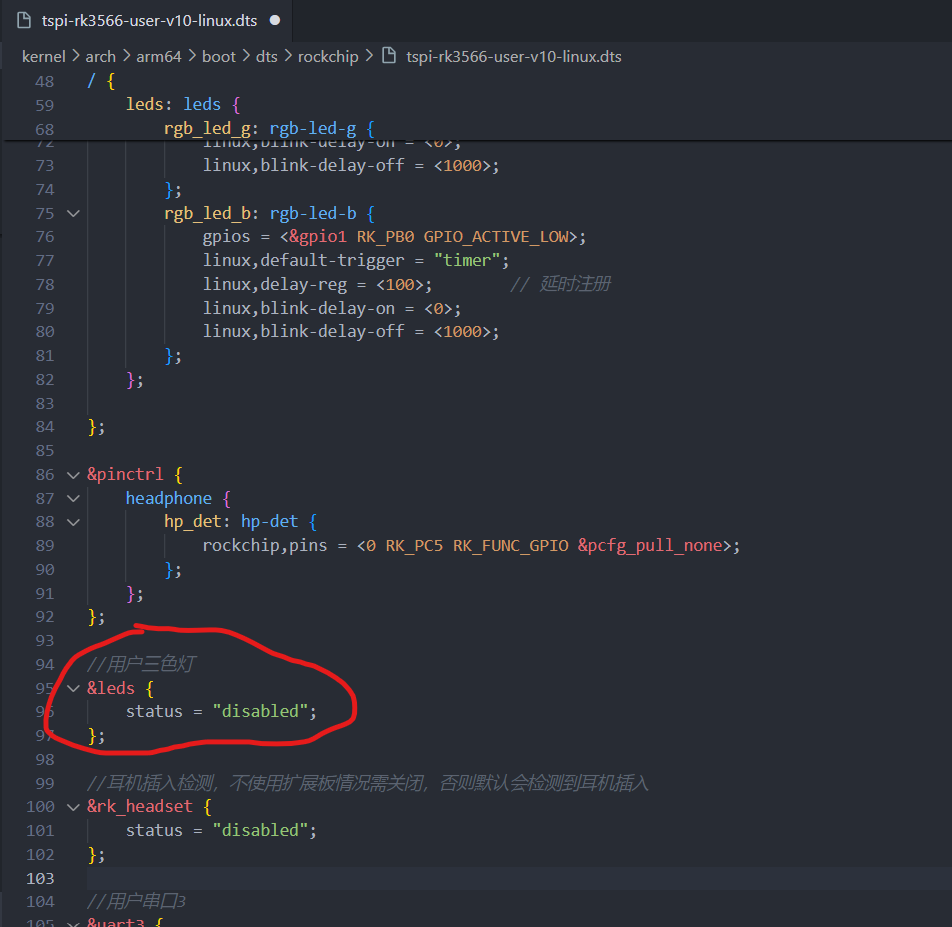
LED默认还是亮,这是因为disabled仅仅是不能闪烁和操作了,而在驱动中LED被默认点亮了。
RGB LED原理图如下所示:
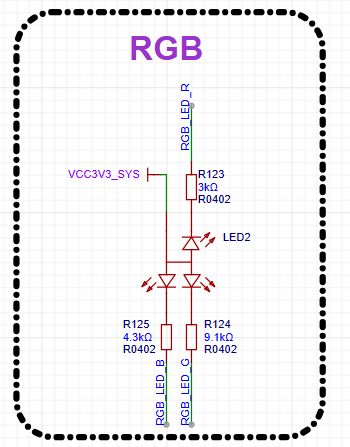
因此如果想熄灭LED,我们可以把上面的
status = "okay";改回来,然后把打开时间blink-delay-on改为0即可
修改设备树失能和使能HDMI输出
在开头写的很清楚:
可以选择注释掉或者如下图进去设置状态为
disabled: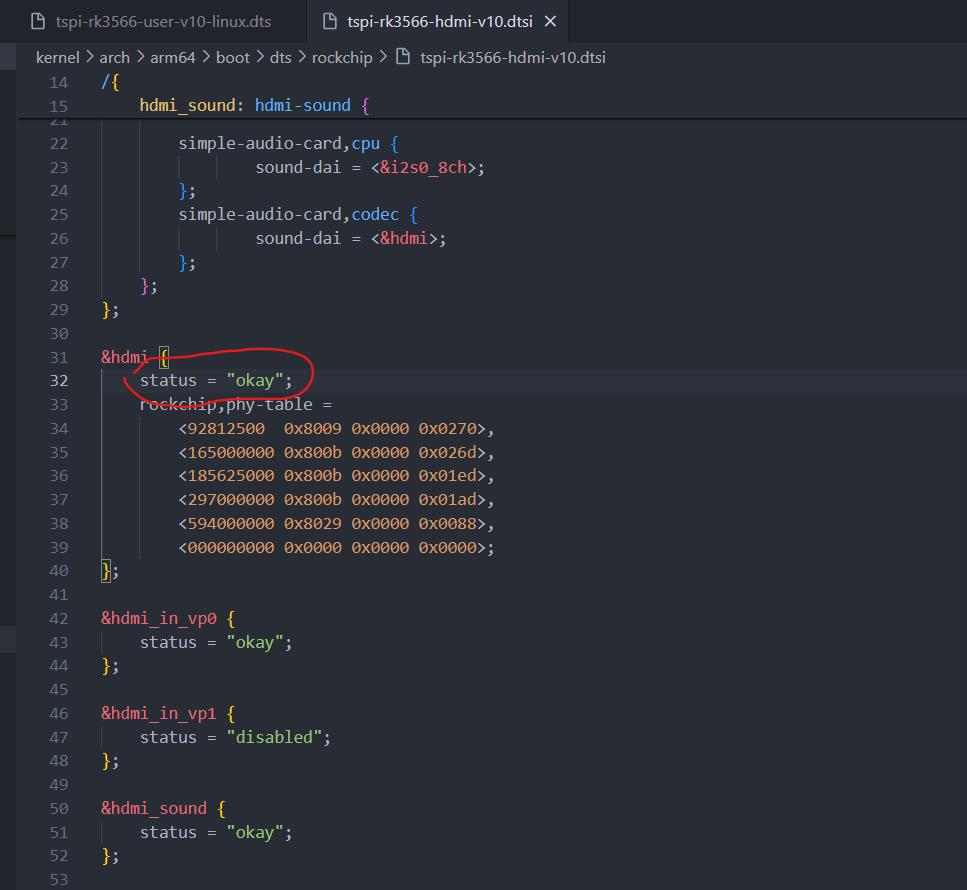
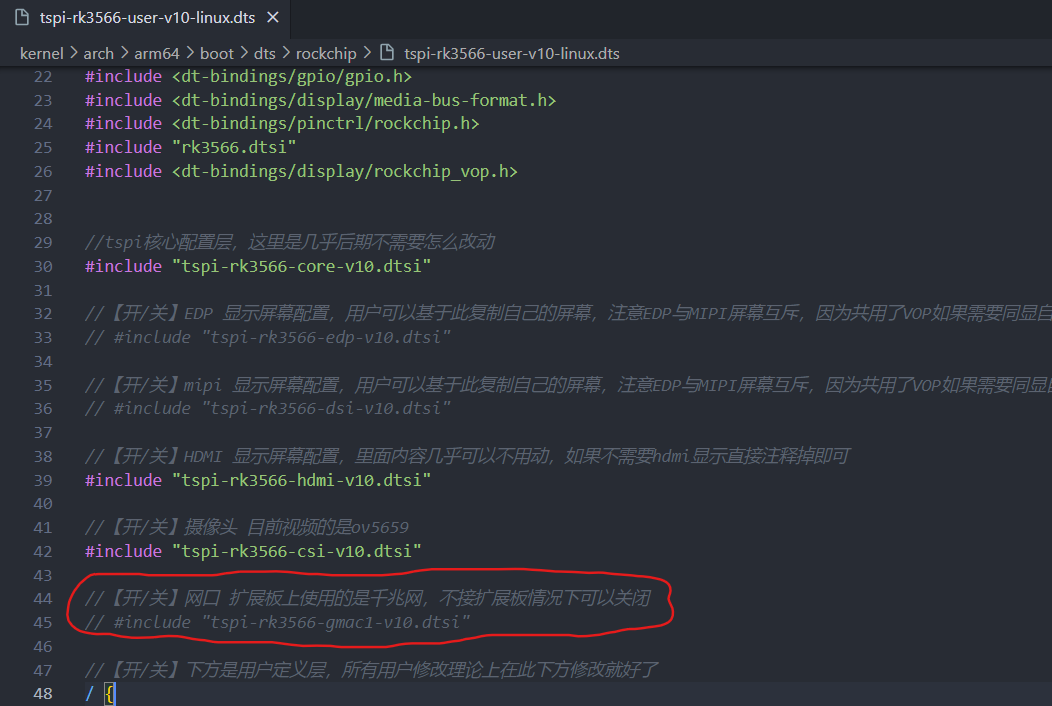
关闭网口解决串口因寻不到网口频繁打印日志问题
同样把网口注释掉就行
调试串口的波特率目前是1500000,尝试把波特率改成115200
修改
tspi-rk3566-core-v10.dtsi中的串口波特率属性,如下图所示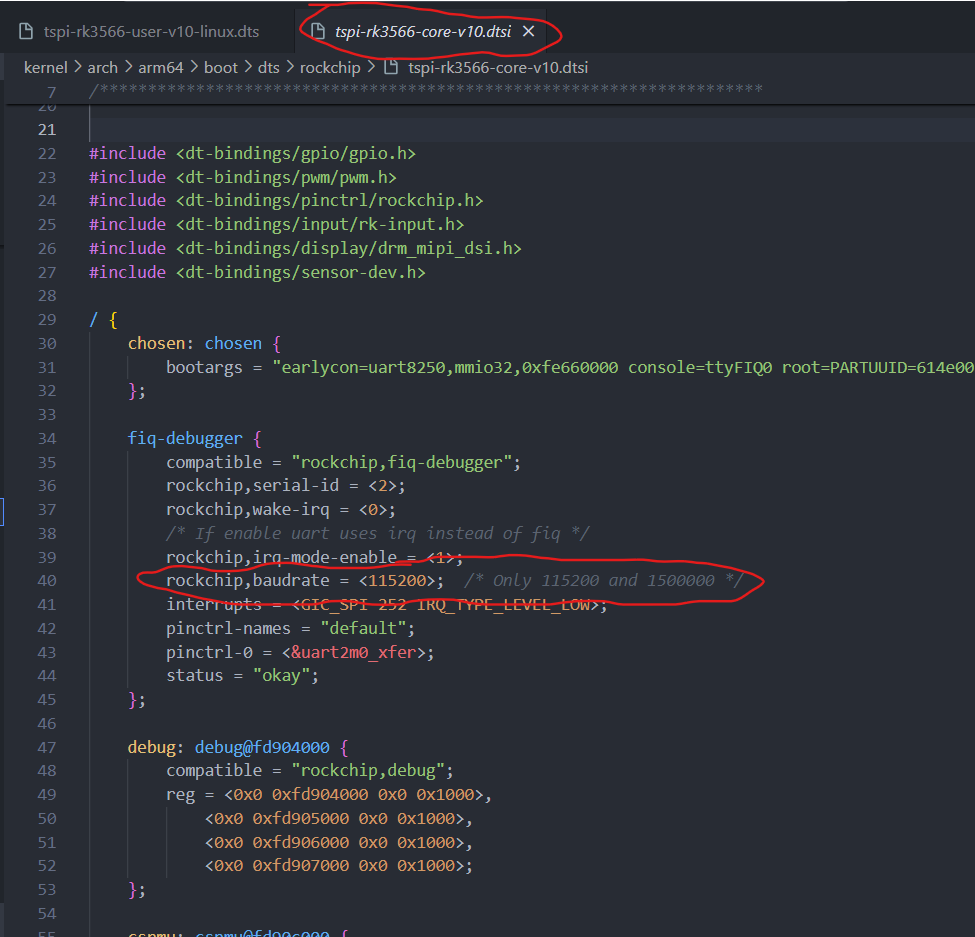
编译内核(包括设备树)#
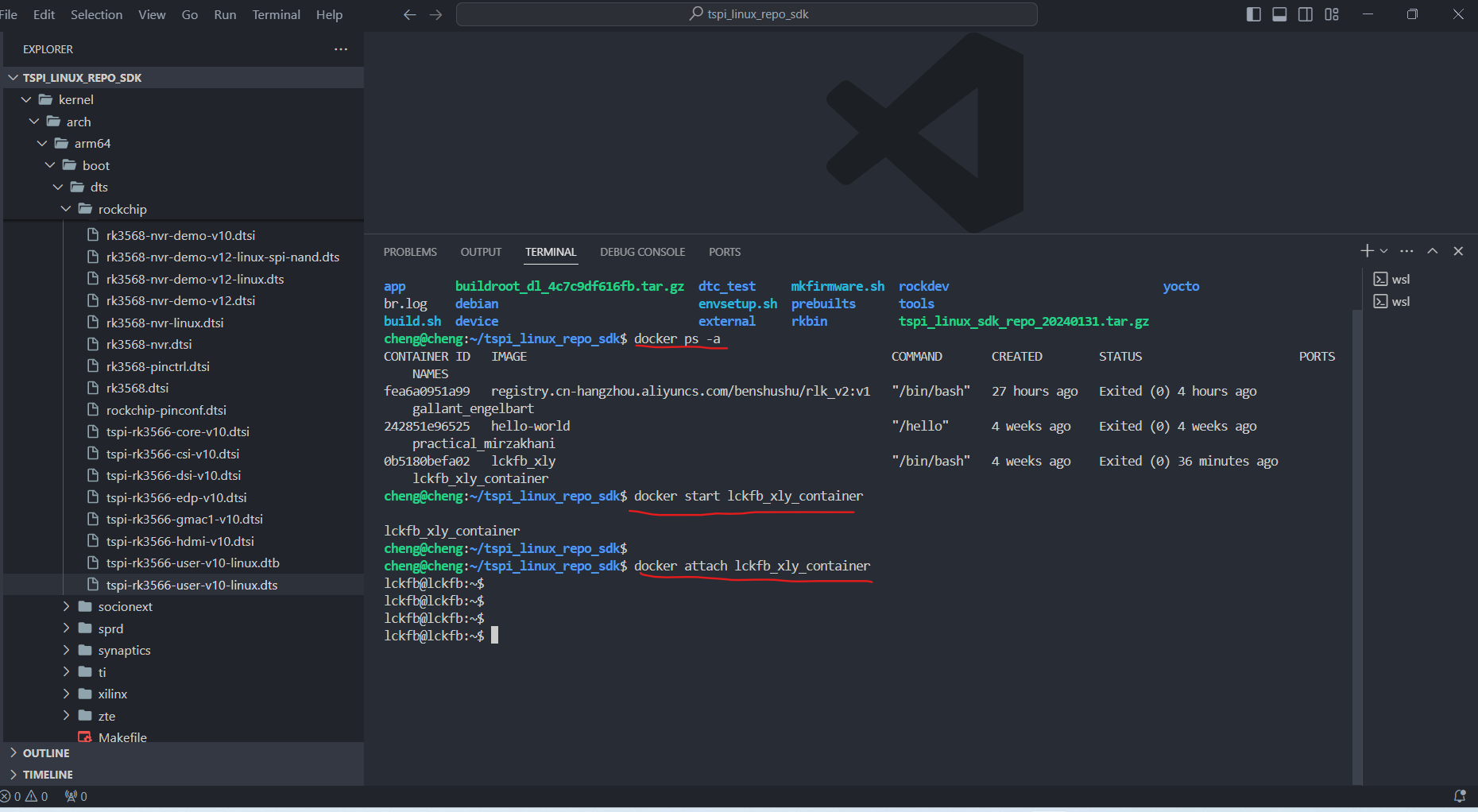
windows需要先打开docker
然后如下图,在命令行启动并进入docker:
编译内核:
拷贝boot.img到windows#
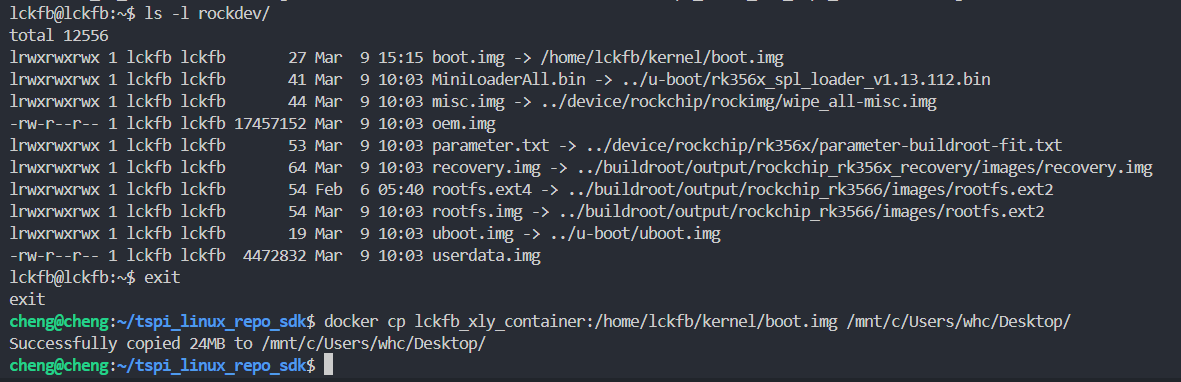
查看rockchip目录,boot.img -> /home/lckfb/kernel/boot.img,我们接下来只需要把/home/lckfb/kernel/boot.img拷贝到windows,注意这里是docker目录。
我们先退出到docker(一定要先退出docker,如果容器正在运行,则复制的文件可能会被锁定),然后使用dockcer cp命令:
lckfb_xly_container:容器名称
/home/lckfb/kernel/boot.img:容器内文件的路径,这里记得修改为你自己的boot.img路径哦
/mnt/c/Users/whc/Desktop/:要拷贝到的容器外的路径,因为WSL2自动把windows的盘符挂载到/mnt目录下,我们可以直接拷贝到windows的桌面上,这里记得修改为你自己的路径哦
下载到开发板#
这一部分就参考立创教程,烧录boot.img就行
- 烧录工具、驱动、配置文件都要下载安装好
- 导入配置
Tspi_Linux_config.cfg - 按住开发板的REC键,点击RST键,进入LOADER设备模式
- 烧录工具仅选中boot,选择自己的boot.img,我的刚才放在桌面了
- 勾选强制按地址写
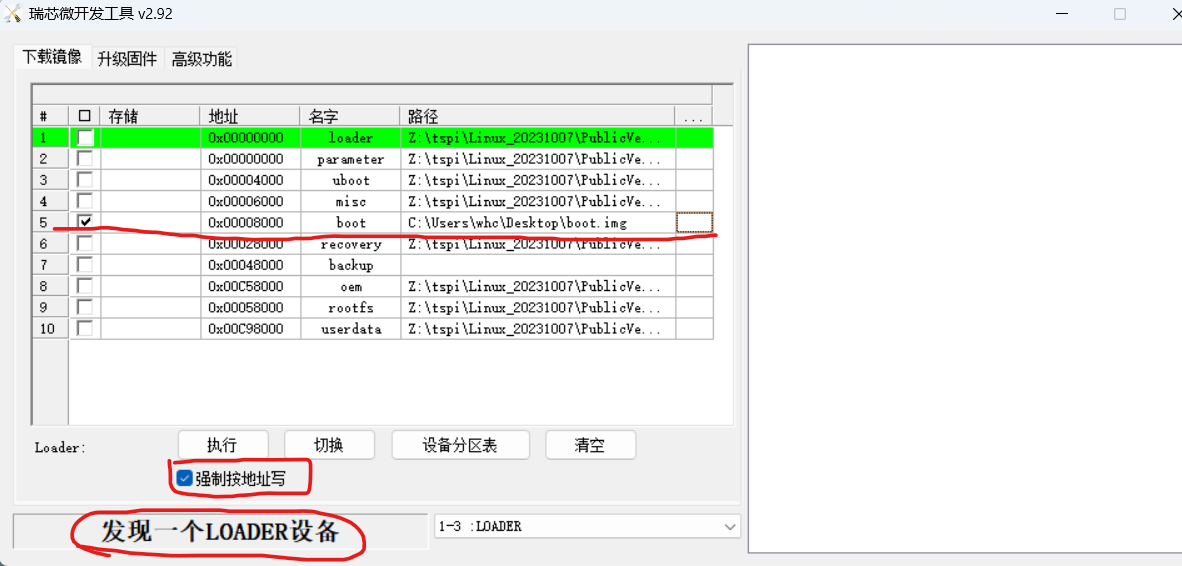
- 点击执行
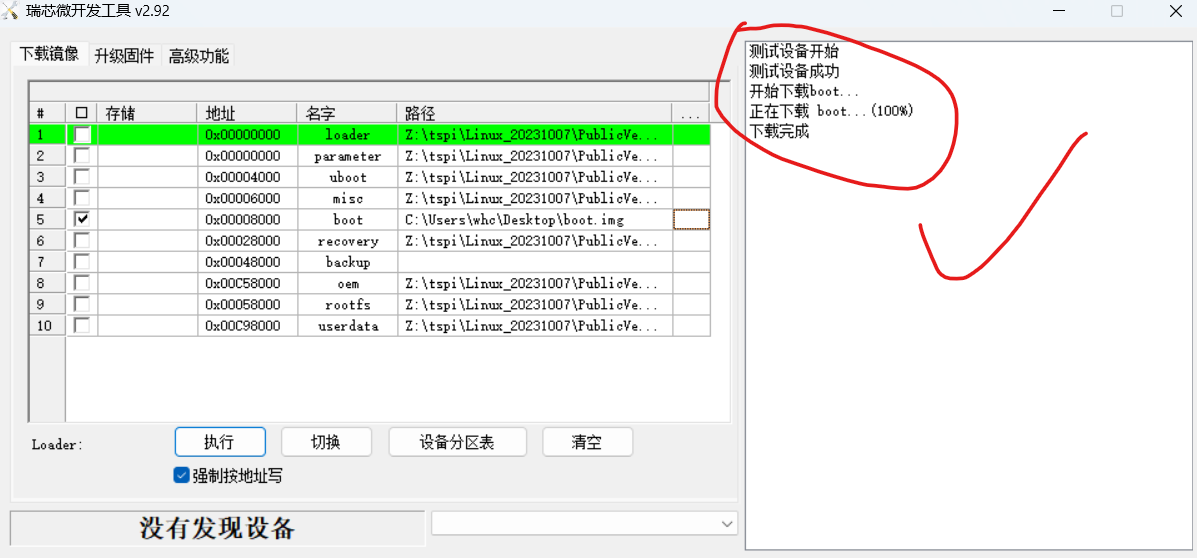
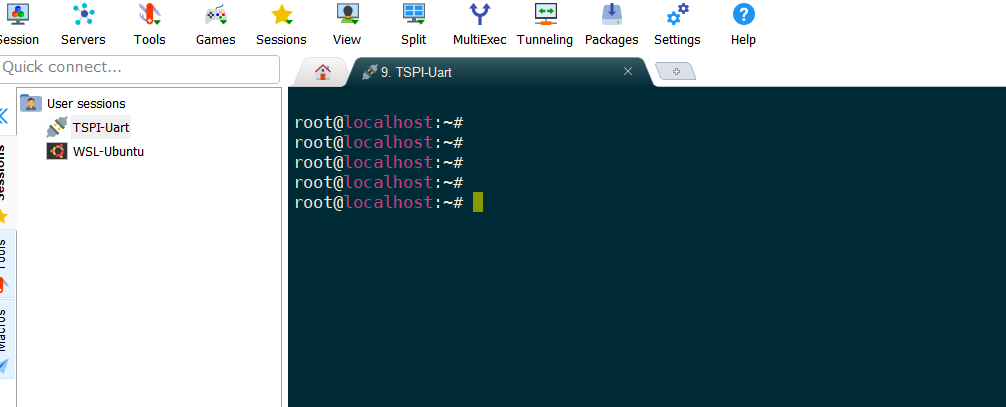
查看结果:
就可以使用串口,波特率为115200连接了。串口也不会打印频繁打印网口日志问题,HDMI插上也没有输出的。
大家可以尝试RGB三个灯同时闪烁就变成了,白色的呼吸灯效果,表示系统运行的“心跳”