Linux项目-多船协同的污染源追踪平台及水质传感系统
2024年8月 · 预计阅读时间: 1 分钟
简介#
本项目旨在开发一套多无人船污染源追溯平台,分别包括多无人船控制终端、无人船系统以及小型低功耗电化学重金属扩散快速监测设备。
首先,在传感器部分,使用通用的电导率传感器、浊度传感器等,且针对当前重金属需要在实验室测试的问题,开发双功能传感器用于检测重金属和流速;
其次,使用 STM32G431 开发无人船系统,主要分为三个部分,
- Lora 通讯模块,负责与多无人船控制终端通讯,上报定位与传感器信息
- RTK 定位模块,使用移远-LC29H 实现无人船的定位
- 传感器模块,包括上面提到的多种传感器
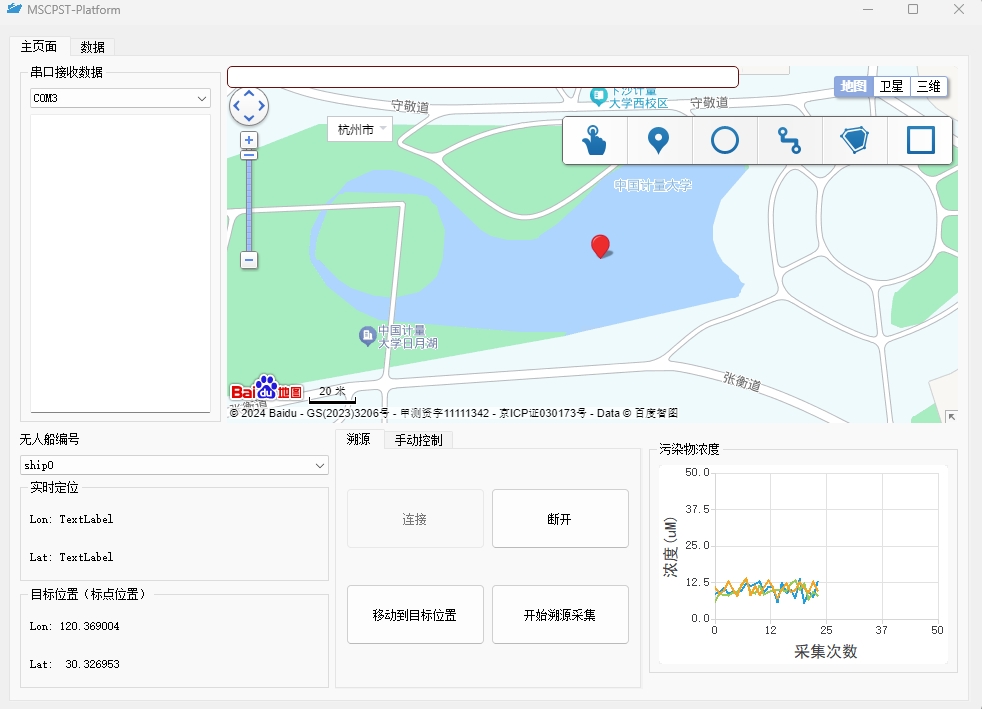
最后,使用 QT 开发多无人船控制终端界面,设置多个控制接口,包括自动溯源、手动控制、选择船只、接受 GPS 信息显示、后台狼群溯源算法等。

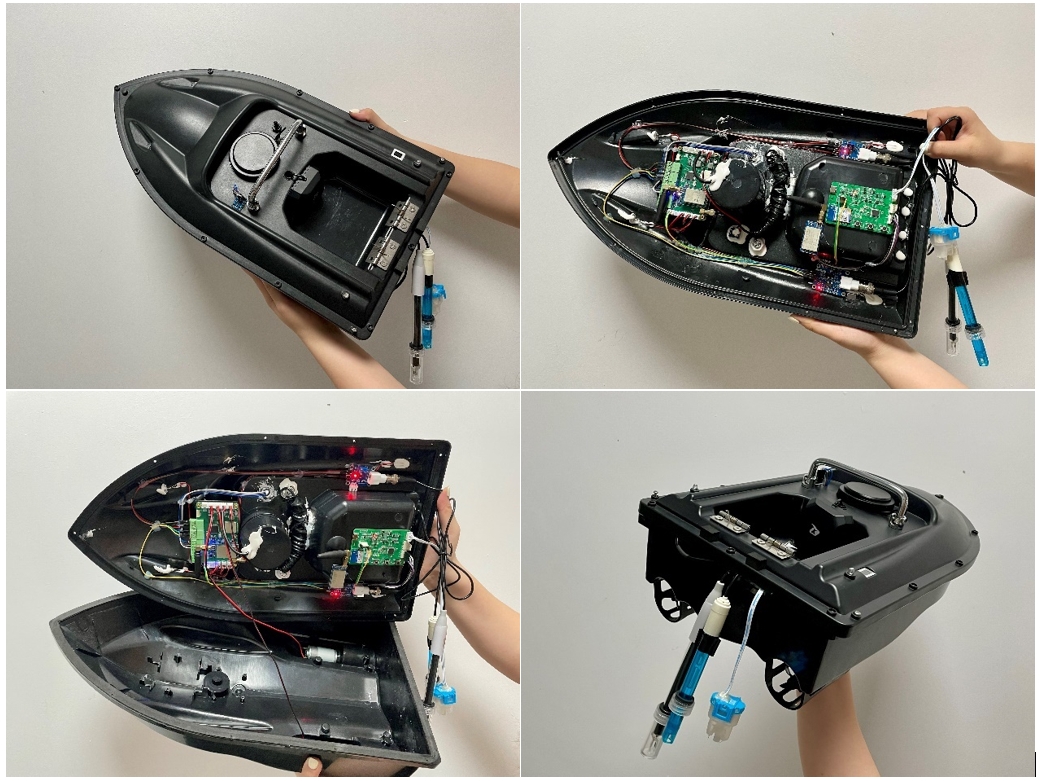
实物展示#

软件界面: